History of development
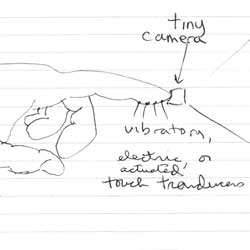 George Stetten devised the concept of the passive version of FingerSight in 1999 (see original drawing to the right).
Stetten also came up with the name "FingerSight" (and claims the trademark) to encapsulate the idea that just as "eyesight" denotes vision through the eye, FingerSight extends vision to the fingers. A number of talented undergraduates and staff at the University of Pittsburgh Department of Bioengineering contributed to designing and constructing various prototypes, including David Weiser, Apryle Craig, and Kimberly Zawrotny. The development has been conducted in the Visualization and Image Anlalysis (VIA) Lab, which Stetten directs.
George Stetten devised the concept of the passive version of FingerSight in 1999 (see original drawing to the right).
Stetten also came up with the name "FingerSight" (and claims the trademark) to encapsulate the idea that just as "eyesight" denotes vision through the eye, FingerSight extends vision to the fingers. A number of talented undergraduates and staff at the University of Pittsburgh Department of Bioengineering contributed to designing and constructing various prototypes, including David Weiser, Apryle Craig, and Kimberly Zawrotny. The development has been conducted in the Visualization and Image Anlalysis (VIA) Lab, which Stetten directs.
 Since ultra-miniature video cameras were unavailable at that time, various schemes were explored for interogating the visual environment including the Single Pixel Optical Transducer (SPOT) and active laser systems that physically vibrated across optical boundaries using regenerative feedback. A version of this was published in the Proceedings of the Haptic Interfaces for Virtual Environment and Teleoperator Systems, IEEE Virtual Reality HAVE 2006 and featured on the cover.
(Click here to download entire paper).
Since ultra-miniature video cameras were unavailable at that time, various schemes were explored for interogating the visual environment including the Single Pixel Optical Transducer (SPOT) and active laser systems that physically vibrated across optical boundaries using regenerative feedback. A version of this was published in the Proceedings of the Haptic Interfaces for Virtual Environment and Teleoperator Systems, IEEE Virtual Reality HAVE 2006 and featured on the cover.
(Click here to download entire paper).
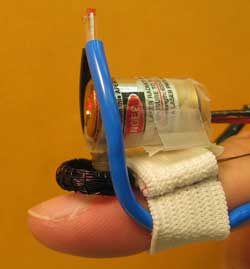
 In 2006 Roberta Klatzky of the CMU Department of Psychology added an important dimension to FIngersight with the idea that, in addition to sensing, the fingertip apparatus could also control elements in the environment. This greatly expanded the potential market from the visually impaired to the general population, motivating the University of PIttsburgh to apply for a patent. At this point, cheap tiny cameras were becoming available. The project has since benefited from the contributions of John Galeotti, currently a post-doctoral fellow at the CMU Robotics Institute, who has been applying computer vision techniques to the recongition and manipulation of computer graphical controls, with the help of Samantha Horvath, Mel Siegel, Kenneth Rockot, Nathan Sendgikoski, and Brock Nichol. The first version of this system was presented at IEEE
HAVE 2007
Haptic, Audio and Visual Environments.
(Click here to download entire paper) and could control a cursor on a screen (see picture to right) providing haptic feedback through a cell phone vibrator attached to the same finger as the camera. The latest version of this approach uses two miniature speakers to present stereo haptic stimulation to the finger tip, and was invited to be shown as part of the New Tech Demos at SIGGRAPH 2008 (Click here to download the updated paper). That version is showcased by a small dinosaur on the home page of this website.
In 2006 Roberta Klatzky of the CMU Department of Psychology added an important dimension to FIngersight with the idea that, in addition to sensing, the fingertip apparatus could also control elements in the environment. This greatly expanded the potential market from the visually impaired to the general population, motivating the University of PIttsburgh to apply for a patent. At this point, cheap tiny cameras were becoming available. The project has since benefited from the contributions of John Galeotti, currently a post-doctoral fellow at the CMU Robotics Institute, who has been applying computer vision techniques to the recongition and manipulation of computer graphical controls, with the help of Samantha Horvath, Mel Siegel, Kenneth Rockot, Nathan Sendgikoski, and Brock Nichol. The first version of this system was presented at IEEE
HAVE 2007
Haptic, Audio and Visual Environments.
(Click here to download entire paper) and could control a cursor on a screen (see picture to right) providing haptic feedback through a cell phone vibrator attached to the same finger as the camera. The latest version of this approach uses two miniature speakers to present stereo haptic stimulation to the finger tip, and was invited to be shown as part of the New Tech Demos at SIGGRAPH 2008 (Click here to download the updated paper). That version is showcased by a small dinosaur on the home page of this website. |